Umgesetzt
Markierung
Pan-Tilt-Kopf mit grünem Laser – überträgt Punkte aus dem Modell auf die Baustelle. Der aktuelle Demonstrator.
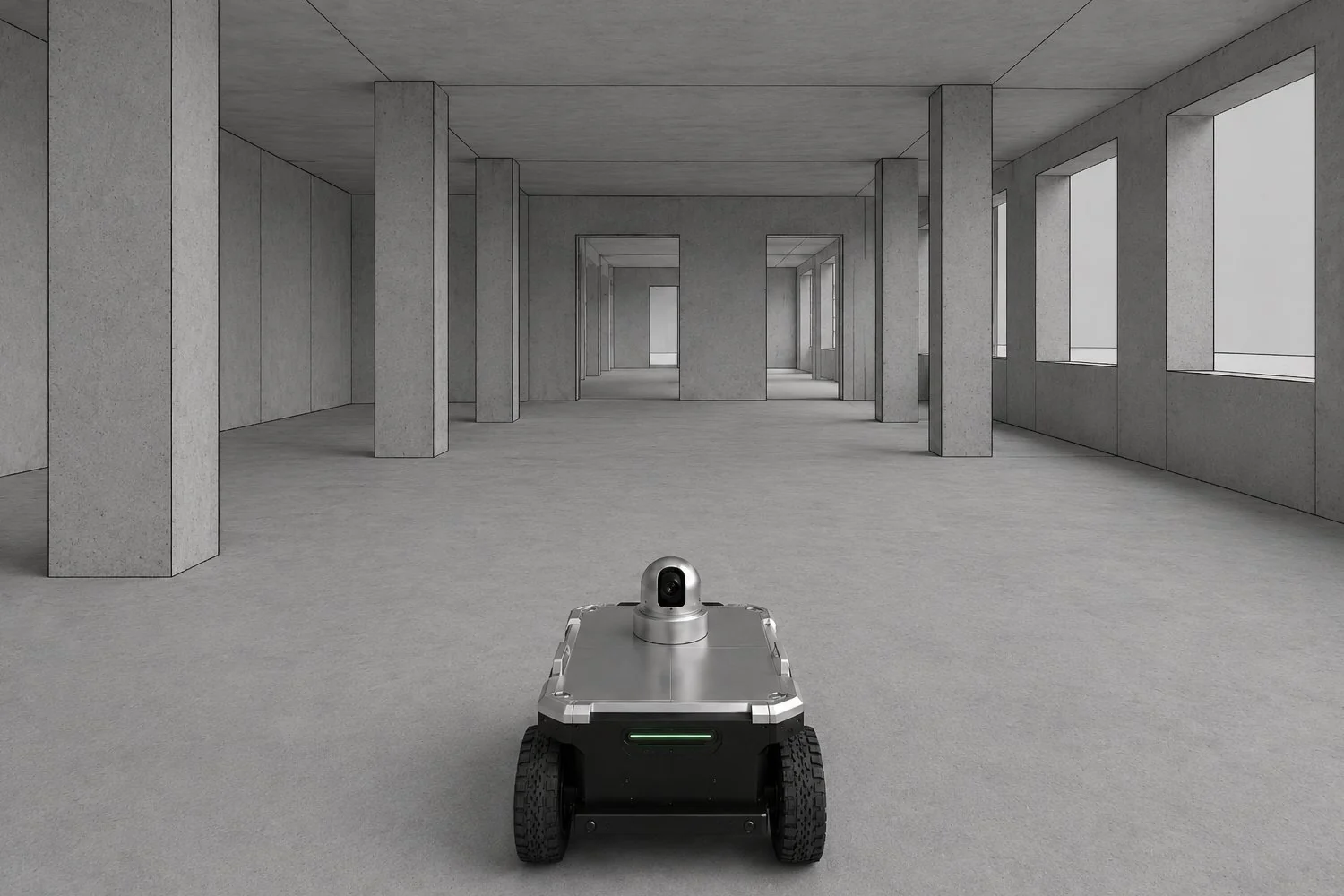
Plattform · PRALEX Chassis
Die modulare Basis von PRALEX: ein Fahrwerk mit gemeinsamem Navigationsmodul, auf dem verschiedene Aufgaben aufbauen – Markieren, Tragen, Vermessen. Dritthersteller montieren ihr Werkzeug über standardisierte Schnittstellen.
Plattform · in Entwicklung

Module
Fahrwerk, Energie, Sicherheit und Navigation bleiben gleich – getauscht wird nur der Aufbau oben. Markierung ist umgesetzt, weitere Rollen sind geplant oder im Konzept.
Umgesetzt
Pan-Tilt-Kopf mit grünem Laser – überträgt Punkte aus dem Modell auf die Baustelle. Der aktuelle Demonstrator.
Geplant
Trägt Werkzeug und Material hinter dem Bauarbeiter her und hält Abstand.
Konzept
Eine Totalstation auf demselben Chassis – für Aufmaß und Kontrolle.
Eigene Seiten: Markierungsroboter · Follow-Me-Roboter · Transportroboter (größere, eigene Plattform).
Navigation
Jeder Roboter teilt sich dasselbe Navigationsmodul: 3D-LIDAR, Laser-Distanzmesser und eine KI-Kamera. Sie bestimmen die Position auf Basis des BIM-Modells in zwei Schritten: zuerst eine Grobpositionierung, dann eine Feinpositionierung.
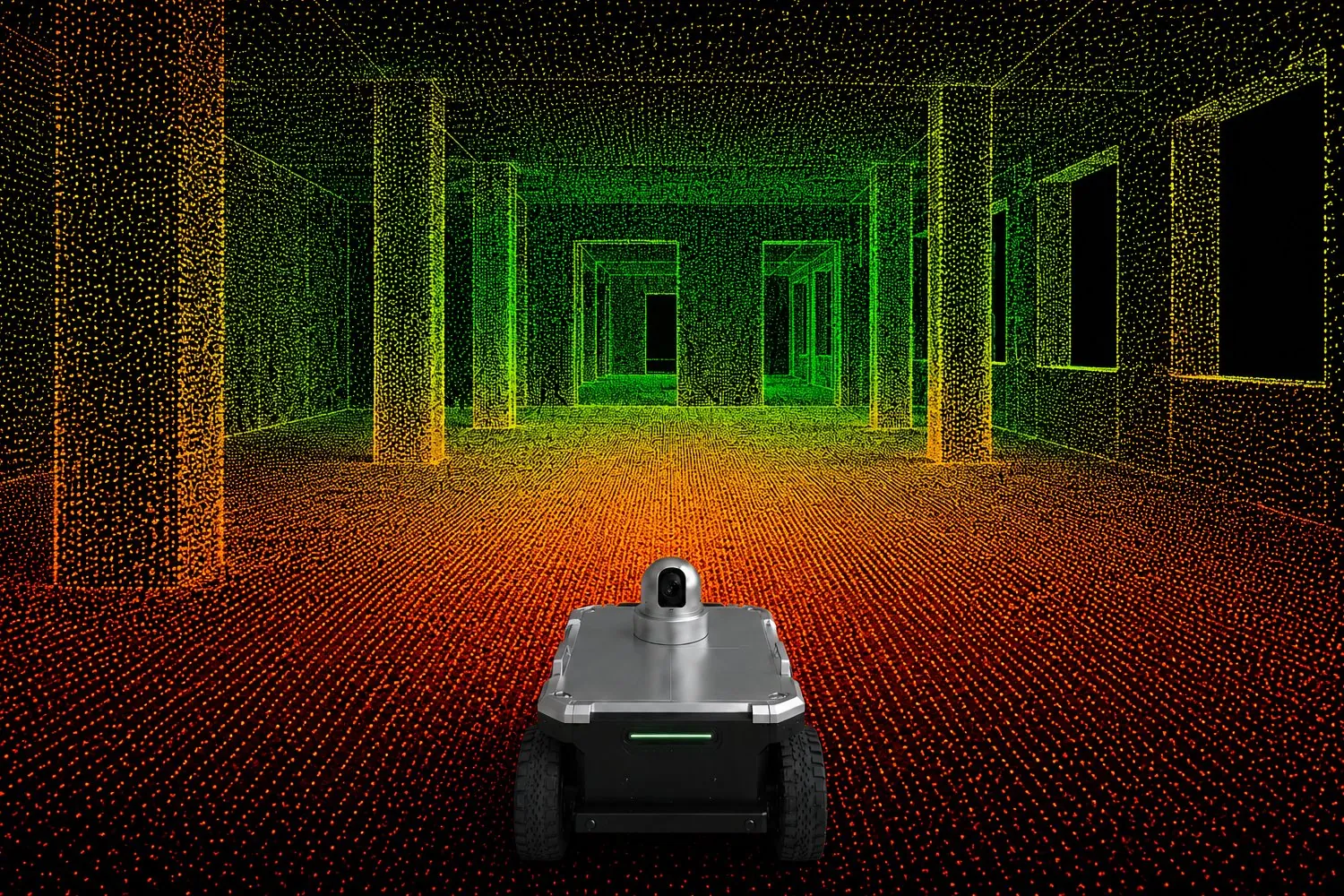
3D-LIDAR
Tastet die Umgebung dreidimensional ab und gleicht sie mit dem BIM-Modell ab (SLAM) – so weiß der Roboter, wo im Raum er ungefähr steht.
Laser-Distanzmesser
Misst die Abstände zu den Wänden – das ergibt die feine Position für die Markierung.
KI-Kamera
Erkennt, welche Bauteile real schon existieren – der Roboter gleicht sich nur gegen Gebautes ab, nicht gegen Wände, die es noch nicht gibt.
Zuerst wird das BIM-Modell als Karte geladen – der Roboter kartiert nicht, er ortet sich nur darin. In der Grobpositionierung bestimmt der 3D-LIDAR die ungefähre Position, und die KI-Kamera blendet aus, was noch nicht gebaut ist. In der Feinpositionierung misst der Laser-Distanzmesser zu den Wänden. So wird aus der groben eine feine Position.
Am aktuellen Prototyp verbaut: der 3D-LIDAR. Laser-Distanzmesser und KI-Kamera sind in Entwicklung bzw. Konzept.
Teil des Ganzen
Das PRALEX Chassis ist der gemeinsame Unterbau – darauf bauen die einzelnen Roboter auf, und über das Robotic Construction Format und PRALEX Link hängt es am Rest des Ökosystems.